Warum brauchen wir den Sensor?
Wir brauchen den Sensor, weil ohne ihn Tests nicht vergleichbar sind:
Sie testen zwei Setups – gleiche Strecke, gleiche Fahrweise – gleiches Ergebnis. Also: keine Entscheidung.
Was Sie nicht sehen: Der Wind war nicht gleich. Eine Variante hatte deutlich mehr (unsichtbare) Windlast – der echte Vorteil wurde überdeckt.
Der Windpuls Sensor macht diesen unsichtbaren Wind am Objekt (auch in Bewegung) messbar und trennt Leistung von Umwelt – damit Sie wirklich vergleichen und sicher entscheiden können.


Wie funktioniert Windmessung Heute?
Windmessung heute ist meist stationär: Messmasten und Wetterstationen erfassen Wind typischerweise in 10 m Höhe (Standard-Messhöhe). Das ist ideal für meteorologische Zwecke und liefert grobe Richtwerte der Windbedingungen in einer Region.
Wind am Objekt?
In der Bewegung messen Sie nicht „den Wind“, sondern den Wind am Objekt: eine Mischung aus Atmosphärenwind und Eigenbewegung. Dadurch ändern sich Richtung und Stärke der Strömung permanent – selbst wenn der Wetterwind „gleich“ wirkt.
Typische Einflussfaktoren:
- Eigene Geschwindigkeit & Richtung (scheinbarer Wind = Wind + Fahrtwind)
- Beschleunigen, Bremsen, Kurven (Dynamik, Anströmwinkel)
- Umgebung: Gelände, Böschungen, Waldkanten, Wasserflächen
- Bauwerke & Infrastruktur: Häuser, Tribünen, Mauern, Brücken → Abschattung/Turbulenz
- Verkehr & andere Objekte: Fahrzeuge, LKW, Züge → Böen und Sog
- Höhe & Position am Objekt (Nähe zum Boden, Anströmung an unterschiedlichen Punkten)
Stationäre Messungen in 10 m Höhe erfassen diese lokalen, bewegungsabhängigen Effekte nur sehr grob – deshalb braucht es Messung direkt am Objekt und synchron zur Bewegung.


Wind in Bewegung.
Weil die Strömung am Objekt durch die Umgebung und die Situation geprägt wird – und sich entlang einer Strecke in Sekunden ändern kann. Aus einem „Wind“ werden viele lokale Windfelder.
Typische Ursachen für Abweichungen (lokal & dynamisch):
- Topografie & Oberfläche: Geländeform, Böschungen, Waldkanten, Wasserflächen, Rauigkeit
- Bebauung & Infrastruktur: Häuser, Mauern, Brücken, Tribünen → Abschattung, Kanalisation, Wirbel
- Verkehr & andere bewegte Objekte: Fahrzeuge/LKW/Züge, andere Fahrer*innen → Böen, Sog, Pulsationen
- Höhe über Grund / bodennahe Schichten (Windgradient, Scherung)
- Böigkeit & Turbulenz (hohe Frequenzen, Winddreher)
Ergebnis: Ohne Messung am Objekt und in Echtzeit sind Runs kaum sauber vergleichbar – Unterschiede können komplett überdeckt werden.
Wind
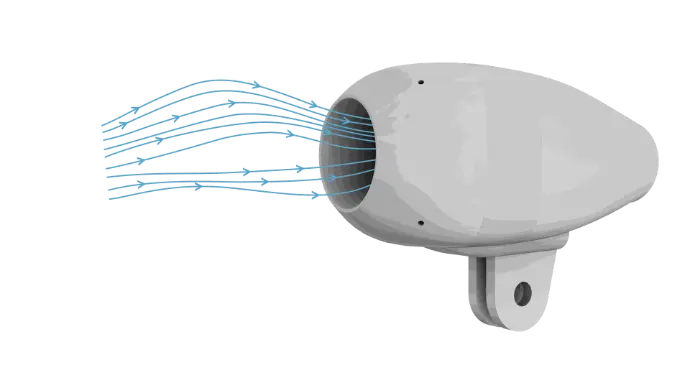
Fühlbarer / scheinbarer Wind am Objekt (Messgrößen & Ergebnisse)

Kerngrößen (3D-Vektor)
- Windgeschwindigkeit Betrag
- x,y,z-Strömungskomponenten
- Anströmwinkel: Nick‑Anströmwinkel, Gier‑Anströmwinkel
Turbulenz / instationäre Strömung
- Turbulenzintensität
- Böenindex
Bewegung
Orientierung

- Roll / Nick Winkel (Euler Winkel
- Quaternionen (w, x, y, z)
- Drehraten (Gyroskop) um x,y,z Achse in rad/s
- Beschleunigungen in x,y,z-Richtung in m/s²
Trajektorie (GNSS / Kinematik)

- Geschwindigkeit (Betrag) + Geschwindigkeitsvektor (ENU)
- Heading und Steigungswinkel der Trajektorie
- Breitengrad / Längengrad / Höhe
Umweltbedingungen
- Temperatur (Umgebung / am Objekt)
- Relative Luftfeuchte
- Luftdruck
- Luftdichte
Schnittstellen
- Mechanisch: Montage/Positionierung mit Go-Pro Halterung
- Elektrisch: Versorgung
-
Daten: z. B. CAN / Bluetooth / Programmierschnittstelle (API)
Qualität & Kalibrierung

- Kalibrierung im eigenen Windkanal
- Referenzmessungen in zertifizierten Windkanälen, Abgleich mit Laser-Doppler-Anemometrie (LDA)